Đánh giá chất lượng dao động của ô tô sử dụng hệ thống treo macpherson tích cực điều khiển rise
Bài báo do nhóm tác giả: Lê Hữu Chúc*, Trịnh Đắc Phong, Trường Đại học công nghiệp Hà Nội được đăng tải trên tạp chí Khoa học công nghệ Trường ĐHCNHN số 52 tháng 06/2019
TÓM TẮT
Bài báo này trình bày kết quả nghiên cứu và đánh giá chất lượng dao động của ô tô sử dụng hệ thống treo tích cực Macpherson bằng điều khiển RISE. Phương pháp điều khiển RISE là một phương pháp điều khiển bền vững và bộ điều khiển RISE là bộ điều khiển thỏa mãn đồng thời tính chất điều khiển ổn định, bên vững và tính chất liên tục. Do vậy, bộ điều khiển này có tính ứng dụng cao vào thực tế. Kết quả nghiên cứu này là cơ sở quan trọng trong định hướng cho các nghiên cứu chuyên sâu về hệ thống treo nói chung và hệ thống treo tích cực nói riêng.
Từ khóa: hệ thống treo Macpherson, điều khiển phi tuyến, Điều khiển RISE
GIỚI THIỆU
Đặc điểm của hệ thống treo MacPherson là giảm thiểu được số điểm lắp với thân xe so với hệ thống treo thông thường (từ 4 điểm – 2 thanh đòn hình tam giác nằm song song với nhau xuống còn 2 điểm của giảm chấn), phần dẫn hướng của hệ thống chỉ còn 1 thanh dẫn hướng nằm phía dưới (lower control arm). Từ đó cải thiện được tính năng lắp ráp, giúp hệ thống treo đơn giản, giá thành rẻ, và tiết kiệm không gian của khoang động cơ đối với xe dẫn động cầu trước. Tuy nhiên hệ thống treo MacPherson có nhược điểm là tính năng ổn định thân xe chưa được cao. Vì vậy việc thiết kế điều khiển cho hệ thống treo tích cực Macpherson vẫn là vấn đề khó cần được nghiên cứu, do mô hình động học của hệ này là phi tuyến và khó xác định được chính xác[1], do đó luôn tồn tại các thành phần bất định trong mô hình động lực học và hệ luôn chịu tác động nhiễu mặt đường. Yêu cầu đặt ra là cần có phương pháp điều khiển bền vững đối với sự bất định của mô hình.
Thuật toán điều khiển RISE là tín hiệu điều khiển liên tục. Thuật toán điều khiển RISE cũng là một thuật toán điều khiển ổn định bền vững, có khả năng kháng miễn và đặc biệt là tính liên tục của tín hiệu, dẫn tới khả năng thực thi cao trong thực tế. Tính ổn định bền vững của thuật toán điều khiển RISE được thể hiện ở chỗ: khi phân tích ổn định theo phương pháp Lyapunov, các tham số của hệ động lực học không đòi hỏi phải xác định tường minh, hơn nữa ngay cả trong trường hợp hệ động học bị tác động của nhiễu tác động ngoài thì tính chất ổn định của hệ không thay đổi. Chính vì những ưu điểm của thuật toán nhóm tác giả muốn nghiên cứu thuật toán điều khiển RISE cho hệ thống treo tích cực trên ô tô.
Toàn văn bài báo: /media/29/uffile-upload-no-title29587.pdf
Thứ Tư, 08:29 25/09/2019

Đoàn thanh niên Khoa công nghệ ô tô phối hợp với Thành đoàn và Đoàn thanh niên nhà trường trao tặng 200 suất quà tới các sinh viên đang chịu ảnh hưởng của Covid 19
Chủ Nhật, 23:27 22/08/2021Cán bộ giáo viên và học sinh sinh viên Khoa công nghệ ô tô nô nức trong ngày bầu cử
Chủ Nhật, 22:45 23/05/2021Trao quyết định thành lập các BM theo đề án đổi mới Khoa Công nghệ Ô tô
Thứ Hai, 15:28 04/05/2020Khoa công nghệ ôtô triển khai, chủ động, sáng tạo trong giảng dạy trực tuyến
Thứ Tư, 14:14 22/04/2020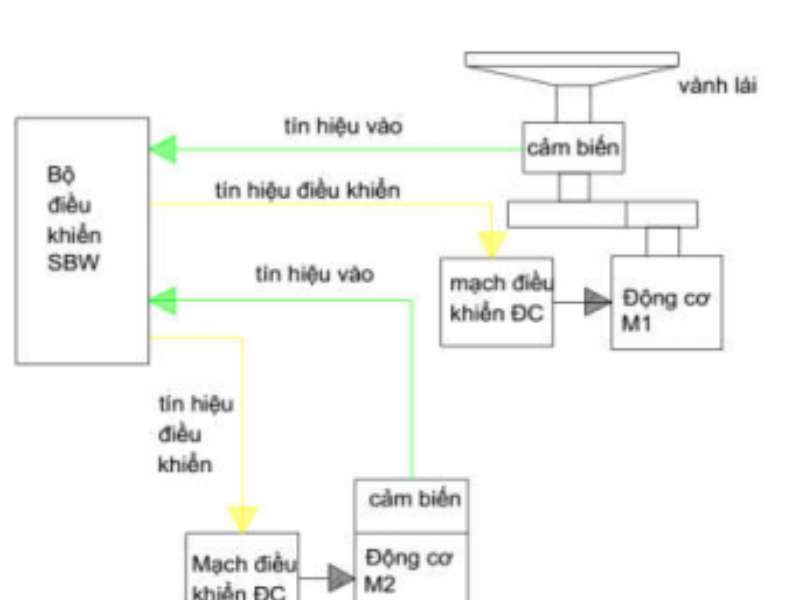
Bài báo Nghiên cứu bộ điều khiển trượt cho hệ thống lái Steer by wire điện tử - thủy lực
Thứ Năm, 14:56 25/11/2021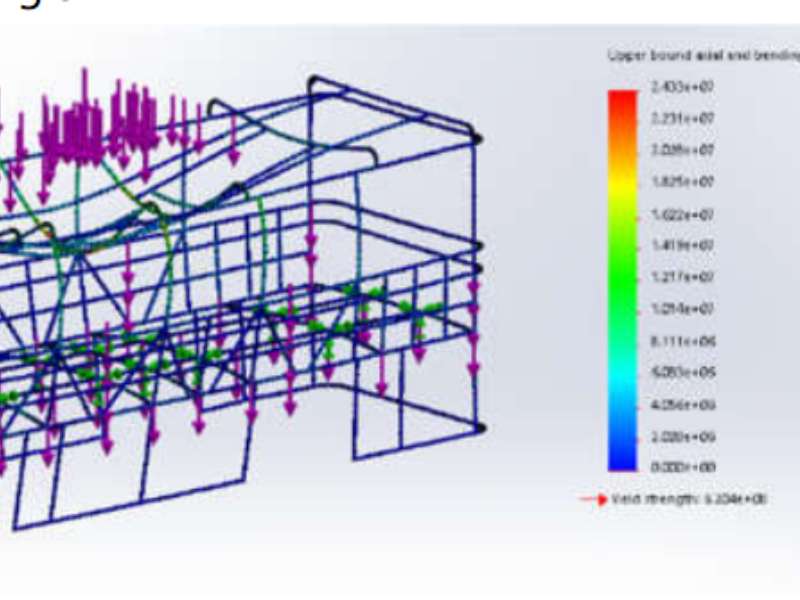
Thiết kế khung xương xe khách 35 chỗ ngồi theo quy chuẩn Việt Nam và phù hợp với Công nghệ sản xuất trong nước
Thứ Sáu, 14:50 29/10/2021
Thiết kế mạch hiển thị tín hiệu các cảm biến trong hệ thống điều khiển động cơ đốt trong trên màn hình LCD
Thứ Sáu, 15:22 22/10/2021
Bài báo: Nghiên cứu thực nghiệm đánh giá quá trình cháy của nhiên liệu trong buồng cháy thể tích không đổi CVCC
Thứ Tư, 14:43 25/08/2021
A study to InvestigatetheEffect of ValveMechanisms on Exhaust Residual Gas and Effective Release Energy Of a Motorcycle Engine
Thứ Năm, 17:13 12/08/2021Bảo vệ đề tài cấp trường: ‘‘Nghiên cứu chế tạo thiết bị đo hệ số cản không khí tác dụng lên khung vỏ ô tô trong quá trình thiết kế xe phục vụ công tác đào tạo”.
Thứ Ba, 15:38 13/08/2019Bảo vệ đề tài cấp trường “ Chuyển đổi động cơ một xi lanh kiểu tự bốc cháy thành động cơ LPG hình thành hỗn hợp bên ngoài”
Thứ Bảy, 11:00 10/08/2019Nghiệm thu đề tài cấp trường: “ Nghiên cứu, chế tạo thiết bị chống trộm sử dụng công nghệ RFID cho xe gắn máy”.
Thứ Sáu, 14:53 12/07/2019Copyright © 2018 Hanoi University of Industry.